This was the first post. In what follows we refer as "pipe" to any external file-descriptor-like artefact used to reach the external world (for input or output).
Connections
The nchan package defines a connection as
This joins two channels to make a full-duplex connection. A process talking to an external entity relies on
this structure to bridge the system pipe used to a pair of channels. There are utilies that leverage the func-
tions described in the previous section and build a channel interface to external pipes, for example:
The function creates processes to feed and drain the connection channels from and to the external pipe. Fur-
thermore, if rw supports closing only for reading or writing, a close on the input or output channels would
close the respective halves of the pipe. Because of the message protocol explained in the previous section,
errors are also propagated across the external pipe and the process using the connection can very much
ignore that the source/sink of data is external.
It is easy to build pipes where the Out channel sends elements through the In channel:
func NewPipe(nbuf int) Conn
And, using this, we can create in-memory connections that do not leave the process space:
This has been very useful during testing, because this connection can be created with no buffering and it is
easier to spot dead-locks that involve both ends of the connection. Once the program is ready, we can
replace the connection based pipe with an actual system provided pipe.
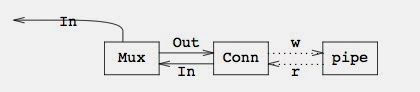
A program speaking a protocol usually creates a new Conn connection by dialing or accepting connections
and then creates a Mux by calling NewMux to multiplex the connection among multiple requests.

In the first case, the multiplexor returns a Conn to the caller with just the Out channel. Of course, this can
be done multiple times to issue several concurrent outgoing requests:

If the request depicted below requires a reply, mux.Rpc() is be called finstead of mux.Out() and the
resulting picture is as shown.

The important part is that messages (and replies) sent as part of a request (or reply) may be streamed with- out affecting other requests and replies, other than by the usage of the underlying connection. That is, an idle stream does not block other streams.
The interface for the receiving part of the multiplexor is a single In channel that conveys one Conn per incoming request. The request has only the In channel if no reply is expected, and has both the In and Out channels set if a reply is expected.
To receive requests from the other end of the pipe, the code might look like this:
for call := range mux.In {
// call is a Conn
for m := range call.In {
Printf("got %v as part of the request\en", m)
}
if call.Out != nil {
call.Out <- []byte("a reply")
call.Out <- []byte("was expected, but...")
close(call.Out, "Oops!, failed")
}
}
The nchan package defines a connection as
type Conn struct {
Tag string // debug
In <-chan []byte
Out chan<- []byte
}
func NewConn(rw io.ReadWriteCloser, nbuf int, win, wout chan bool) Conn
It is easy to build pipes where the Out channel sends elements through the In channel:
func NewPipe(nbuf int) Conn
func NewConnPipe(nbuf int) (Conn, Conn)
Multiplexors
Upon the channel based connections shown in the previous sections, the nchan package provides multiplex- ors.
Upon the channel based connections shown in the previous sections, the nchan package provides multiplex- ors.
type Mux struct {
In chan Conn
...
}
func NewMux(c Conn, iscaller bool) *Mux
func (m *Mux) Close(err error)
func (m *Mux) Out() chan<- []byte
func (m *Mux) Rpc() (outc chan<- []byte, repc <-chan []byte)
The nice thing of the multiplexed connection is that requests may carry a series of messages (and not just
one message per request) and may or not have replies. Replies may also be a full series of messages. Both
ends of a multiplexed connetion (the process using the mux and its peer at the other end of the pipe) may
issue requests. Thus, this is not a client-server interaction model, although it may be used as such.
To issue new outgoing requests through the multiplexor, the process calls Out (to issue requests with no expected reply):
Or the process may call Rpc (to issue requests with an expected reply).
To issue new outgoing requests through the multiplexor, the process calls Out (to issue requests with no expected reply):
oc := mux.Out()
oc <- []byte("no reply")
oc <- []byte("expected")
close(oc)
rc, rr := mux.Rpc()
rc <- []byte("another")
rc <- []byte("request")
close(rc)
for m := range rr {
Printf("got %v as part of the reply\en", m)
}
Printf("and the final error status is %v\en", cerror(rr))
In the figure, the two connections of the left were built by two calls to mux.Out(), which returns a Conn
with an Out chan to issue requests. The process using the Out channel may issue as many messages as
desired and then close the channel.
The important part is that messages (and replies) sent as part of a request (or reply) may be streamed with- out affecting other requests and replies, other than by the usage of the underlying connection. That is, an idle stream does not block other streams.
The interface for the receiving part of the multiplexor is a single In channel that conveys one Conn per incoming request. The request has only the In channel if no reply is expected, and has both the In and Out channels set if a reply is expected.
To receive requests from the other end of the pipe, the code might look like this:
for call := range mux.In {
// call is a Conn
for m := range call.In {
Printf("got %v as part of the request\en", m)
}
if call.Out != nil {
call.Out <- []byte("a reply")
call.Out <- []byte("was expected, but...")
close(call.Out, "Oops!, failed")
}
}
For example, if a process received two requests, one with no reply expected and another with a reply
expected, the picture would be:

The important thing to note is that processes may now issue streams of requests, or replies, through
channels and they are fed to external pipes (or from them) as required. The interfaces shown have greatly
simplified programming for (networked) system serviced being written for the new system.
Here, the two connections on the left represent requests that were received through the In channel depicted
on top of the multiplexor.
